
Paprastai mikrorobotai projektuojami pagal bičių pavyzdį, kurios skraido nuolat plasnodamos sparnais. Toks skrydžio būdas reikalauja daug energijos, todėl maži robotai greitai išsikrauna beveik iškart po pakilimo.
Komanda nusprendė ištirti, kaip žiogai derina šuolius, plasnojimą sparnais ir sklandymą. Tikslas – išmokyti robotus naudoti energiją tik tada, kai tai tikrai būtina. Mechanikos ir aeronautikos inžinerijos asocijuotoji profesorė Eimi Vissa paaiškino, kad sklendimas yra „pigus“ energijos sąnaudų požiūriu skrydžio būdas.
Skirtingai nuo bičių ir musių, žiogai gali kurį laiką sklęsti ore beveik nenaudodami energijos. Tai leidžia robotui naudoti energiją greičiui pasiekti, o tada išskleisti sparnus ir sklęsti, taupant baterijos energiją.
Susiję straipsniai

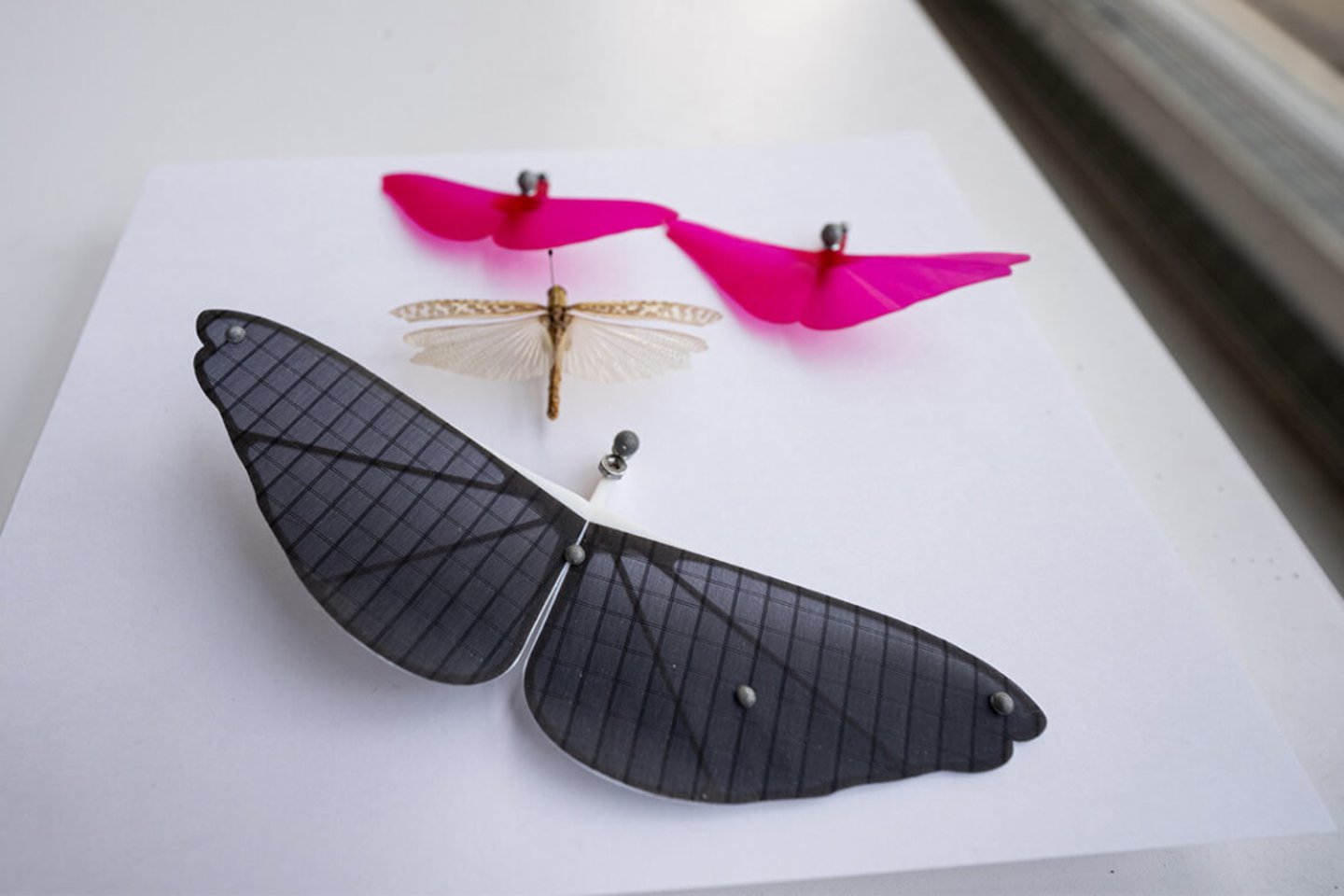
Tyrimo metu inžinieriai bendradarbiavo su biologais iš Ilinojaus universiteto. Jie tyrinėjo tikrųjų vabzdžių sparnų struktūrą, sutelkdami dėmesį tik į užpakalinius sparnus. Būtent jie turi sudėtingą trimatę formą su „kryželiais ir įdubimais“, kuri užtikrina tvirtumą plasnojant ir leidžia kompaktiškai sulankstyti sparną, kai jis nenaudojamas.
Norėdami išsamiai ištirti šią struktūrą, mokslininkai atliko labai tikslius užpakalinių sparnų kompiuterinės tomografijos tyrimus. Paaiškėjo, kad „akordeono“ forma leidžia lengvai sulankstyti sparnus judant ant žemės ir išskleisti juos skrydžio metu su minimaliu oro pasipriešinimu.
Norėdami patikrinti savo idėjas, komanda spausdino sparnus 3D spausdintuvu ir išbandė juos vandens kanaluose. Vandens srautas padėjo imituoti, kaip oras apteka sparną, ir pakoreguoti jo formą. Po to sparnai buvo pritvirtinti prie lengvų karkasų ir paleisti Prinstono robotų technologijų laboratorijoje.
Skrydį fiksavo greitaeigės kameros. Rezultatas – dirbtiniai sklandytuvai parodė efektyvumą, palyginamą su tikrų žiogų skrydžiu.
Tyrimas davė ir netikėtą rezultatą. Nors gamtoje žiogų sparnai yra reljefiniai, bandymuose lygūs sparnai sklandė geriau. Pasak E. Vissos, tai gali reikšti, kad toks reljefas išsivystė ne dėl geresnės aerodinamikos, o dėl kitų priežasčių – pavyzdžiui, kad sparnai lengviau sulankstytų arba išlaikytų staigius skrydžio kampus.
Kitas komandos tyrimų etapas – išmokti automatiškai išskleisti ir sulankstyti sparnus nenaudojant sunkių variklių. Jei tai pavyks, ateities robotai galės ne tik skristi, bet ir šokinėti, ropinėti ir sklęsti, dirbdami su vienu baterijos įkrovimu, rašo „New Voice“.
Tyrimas publikuotas žurnale „Journal of the Royal Society Interface“.